Dies ist nur ein Howto für mich selbst und wen es sonst noch interessiert. Die Anleitung funktioniert mit meinem System, bei anderen Menschen kann das wieder ganz anders sein. Daher: Nachmachen auf eigene Gefahr!
Ausgangslage: Ich möchte meinen 3D Drucker, den ich über den
OctoPrint Server, der unter
OctoPI auf einem
Raspberry PI 3B+ läuft, und somit über jeden vom Server zugelassenen Rechner aus zu steuern ist, notfalls auch mal vor Ort in der Druckerei steuern können, ohne mir dort gleich einen Computer hinstellen zu müssen, der dann die meiste Zeit doch nur als Terminal vor sich hin verstaubt. Was liegt also näher, als die Himbeere mit einem halbwegs bedien- und erkennbaren berührungsempfindlichen Display auszustatten und damit die
TouchUI zu bedienen?
Nach diversen Versuchen und Überlegungen bei der Suche nach einer angemessenen Unterbringung für den Rapsberry habe ich mich dann für
Thing:2837163 entschieden, für das ein halbwegs finanzierbares
Display über Alieexpress zu bekommen ist. Einige Wochen später klingelte denn auch der Bote aus dem fernen Osten und überreichte mir ein gut verpacktes Behältnis mit dem Display, welches bei genauerer Betrachtung einem
Waveshare recht ähnlich sieht, jedoch - Chinas kapitalistischer Enklave
Shenzen sei Dank - nur
einen Teil dessen kostet, was für das nebenan gefertigte Waveshare fällig gewesen wäre und das
bei Aliexpress auch deutlich günstiger als
beim großen Fluß zu bekommen ist. Allerdings mit 3 Wochen Lieferzeit. Das Boardlayout ebenso wie der Chipsatz sieht dem hochpreisigerem Pendant jedenfalls zum Verwechseln ähnlich.
Was folgte, waren jedoch ein gutes Dutzend Versuche, das Display so zum Laufen zu bekommen, wie ich bzw. das von mir auserkorene Gehäuse das gerne hätte: Nämlich um 180° gedreht, damit der HDMI Connector in der dafür im Gehäusedesign eigens vorgesehenen Aussparung verschwinden kann. Die Anzeige des Displays ist dabei weniger das Problem, diese findet via HDMI statt, vielmehr ist ja Bildausgabe und Toucheingaben zweierlei. Das Display kann leicht um 180° gedreht werden, indem man sich per ssh auf dem Raspberry anmeldet:
ssh pi@octopi.lan
gefolgt von
sudo nano /boot/config.txt
und dann diesen Text am Ende um die Zeile
display_rotate=0
ergänzt. Klappt ganz gut, wenn man dann mit ctrl+x die so manipulierte Datei speichert und mit
sudo reboot -n
einen Neustart einleitet.
Treib(er)jagd
Die oben erwähnten erfolglosen Versuche, auf dem so gedrehten Display nun auch die Touch Eingabe einrichten zu können, hatten mich dann dazu veranlasst, doch mal nebenan,
bei Waveshare zu schauen, wie das dort gelöst wurde. Denn die
Elcrow KollegInnen wußten zwar von einer veralteten Treiber CD zu berichten und wie man das Display ihrer Ansicht nach zum Kooperieren bewegt, in der Praxis hatte dann trotzdem der Mauszeiger (heißt das auch so, wenn man den Finger dazu benutzt, um Eingaben zu tätigen??) das Gegenteil von den Bewegungen veranstaltet: Nach unten wischen - Zeiger wandert nach oben, nach Rechts wischen - Zeiger begibt sich schnurstracks nach links. Wenn das nur im richtigen Leben auch so wäre...
Wie auch immer: Bei Elcrow ist die Zeit offenbar vor dem Update des Eingabetreibers für den X-Server stehen geblieben, weshalb der entscheidende Hinweis auf die Verwendung des
entsprechenden Treibers dort fehlt. Wenn wir schon mal auf der ssh Konsole sind, installieren wir diesen mit
sudo apt install xserver-xorg-input-evdev
Anschließend kopieren wir die Konfigurationsdatei dergestalt, daß sie eine höhere vorangestellte Zahl im Dateinamen hat wie die anderen im Zielverzeichnis. Dies, um zu verhindern, daß ein möglicher anderer Eingabetreiber die Bemühungen, das Touchdisplay einzurichten, verhindert:
sudo cp -rf /usr/share/X11/xorg.conf.d/10-evdev.conf /usr/share/X11/xorg.conf.d/45-evdev.conf
sudo reboot
Neuausrichtung
Nun lässt sich auch die Feinabstimmung mittels Eingabekalibration vornehmen. Dazu installieren wir das entsprechende Tool, wir nehmen dabei das der aktuellen
Raspbian Version, somit gibt das bei späteren Updates auch weniger Treiberfolklore...:
sudo dpkg -i -B xinput-calibrator
Wir starten jetzt das System dazu nochmals neu, damit die Kalibrierung gestützt auf diese Treiber stattfindet. Nach dem erfolgreichen Login gehen wir dazu in der grafischen Benutzeroberfläche mit der Maus /
Touchpen / Zeige- oder sonst einem Finger auf die Himbeere oben links und rufen unter "Einstellungen" das Kalibriertool auf. Mit dem entsprechenden Zeigegerät tippen wir auf die darin gezeigten 4 Punkte und Kopieren den anschließend ausgegebenen Text in die Datei
/ect/X11/xorg.conf.d/99-calibration.conf
Bei mir steht folgendes darin (Die diversen Optionen für die Einträge gibt es z.B.
hier zur Auswahl. Auch ein Hersteller von 5" Displays ;-):
Section "InputClass"
Identifier "calibration"
MatchProduct "ADS7846 Touchscreen"
Option "Calibration" "3905 208 3910 288"
Option "SwapAxes" "0"
EndSection
Abspeichern wie gehabt, neu booten. Nun sollte das System zügig starten und auf Benutzereingaben entsprechend reagieren.
Das erfreut uns, weshalb wir derartig motiviert sogleich zur Installation der Touch Oberfläche von OctoPrint schreiten. Hier hat der User
jdufresne1 alles wichtige in seinem
Beitrag ausgeführt, weshalb ich nur noch kurz darauf eingehe. Wieder per ssh auf dem Druckserver einloggen. Dann mit:
sudo apt install chromium-browser -y
den Browser für die Touch Oberfläche installieren. In dessen Fenster läuft zukünftig dann alles rund um die Bedienung des Druckservers ab. Anschließend daran laden wir die Autostart Prozedur von TouchUI herunter und machen in einem Abwasch die lokale Installation auf dem Raspberry startklar:
git clone https://github.com/BillyBlaze/OctoPrint-TouchUI-autostart.git ~/TouchUI-autostart/
Noch kurz diverse Einstellungen und Hilfstools installieren:
sudo ~/TouchUI-autostart/helpers/install
Nach einem Neustart sollte nun die TouchUI Oberfläche den 5" Bildschirm des Raspberry verzieren. Wer möchte, kann den Raspberry auch so einrichten, daß er ohne Benutzername und Passwort durchstartet.
Mehr dazu im Wiki von TouchUI.
Der Vorteil des eingangs erwähnten Gehäuses ist, daß es genügend Platz bietet, zum Beispiel für ein
Stepdown Modul, um die Energieversorgung des Rechners zukünftig vom nicht ausgelasteten Netzteil des Druckers sicherzustellen sowie für einen
entsprechenden Lüfter. Falls es doch mal heißer her geht.
Irgendwie muss ich das alles finanzieren, daher sind die allermeisten Links
Affiliate. D.h.:Solltet Ihr über diese Links zu einem Onlinehändler geraten und dort etwas bestellen, bekomme ich eine kleine Provision, für Euch ändert das am Preis natürlich nichts. Für die Inspirationen geht ein herzliches Dankeschön an die genannten Personen, insbesondere an die OctoPrint Community!
Keep on
Coding Printing!
 Just copied my last project from Thingiverse here. It's another quick'n'dirty "designed" simple Cover for the Meanwell RS 150-48 PSU, which works (for me) together with a DPS 5015 Module.
Just copied my last project from Thingiverse here. It's another quick'n'dirty "designed" simple Cover for the Meanwell RS 150-48 PSU, which works (for me) together with a DPS 5015 Module. Seit heute läuft hier die stabile Version
Seit heute läuft hier die stabile Version 

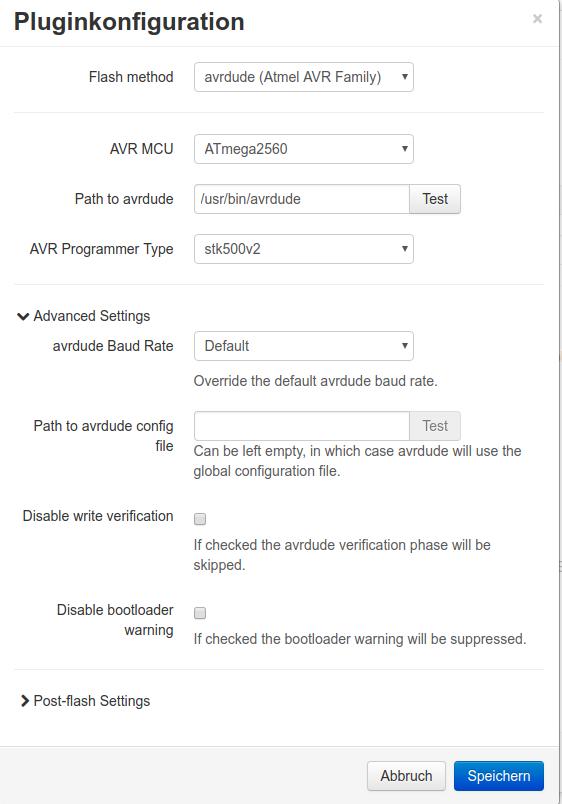 Neue Firmware lässt sich natürlich direkt aus der
Neue Firmware lässt sich natürlich direkt aus der 

